publications
2026
-
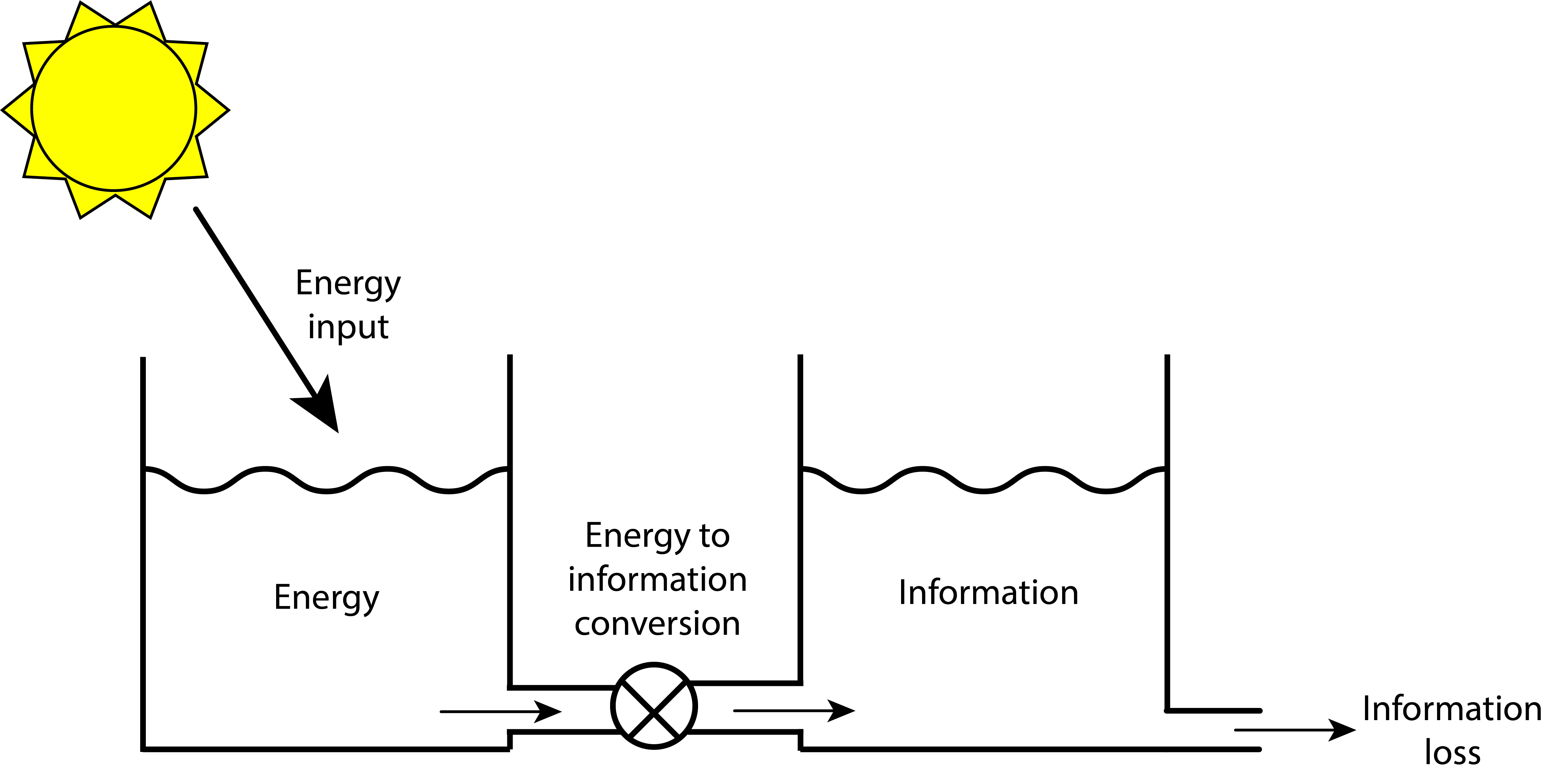 Quantifying and Leveraging the Information Value of Energy in the Control of Sustainably Powered Mobile RobotsIn (In Preparation)2026 IEEE 65th Conference on Decision and Control (CDC), 2026
Quantifying and Leveraging the Information Value of Energy in the Control of Sustainably Powered Mobile RobotsIn (In Preparation)2026 IEEE 65th Conference on Decision and Control (CDC), 2026 -
 Clarity-Driven Adaptive Mission Planning for a Solar-Powered Autonomous Surface VesselIn (Under Review) IEEE Transactions on Control Systems Technology (TCST), 2026
Clarity-Driven Adaptive Mission Planning for a Solar-Powered Autonomous Surface VesselIn (Under Review) IEEE Transactions on Control Systems Technology (TCST), 2026